Mohammed Azharudeen Farook Deen
I'm excited about building intelligent robots.

Aachen,
Germany
👋 Hey there! I’m a Robotics Engineer (M.Sc. Robotic Systems Engineering, RWTH Aachen) passionate about building intelligent agile robots through deep robot learning and optimal control.
I have experience developing learning-based controllers (Reinforcement and Imitation learning) for both manipulation and locomotion, and complement this with a strong background in classical control and optimization methods.
I’m currently seeking full-time opportunities in robotics, working with PyTorch/JAX, Python/C++, ROS1/ROS2, Docker, and simulation platforms such as MuJoCo and NVIDIA Isaac Sim/Gym.
When I’m not working with robots, you’ll find me tinkering with new tech, picking up new sports, or enjoying the outdoors.
Click here to read more about my background
Education

B.Tech., Major in Mechanical Engineering
Minor in Electronics & Communication Engineering, Specialization in Computational Techniques;
Coursework: Introduction to Robotics, Introduction to Computing and Programming, Embedded Systems Hardware, Linear Algebra, Finite Element Methods, Advanced Computer Programming and Numerical Technique, Mechatronics and Control System, Mechanical Vibrations, etc.

M.Sc., Robotic Systems Engineering
Coursework: Robotic Systems, Advanced Robotic Kinematics and Dynamics, Multibody Dynamics, Advanced ML, Introduction to AI, Computer Vision, RL & Learning-Based Control, Linear Control, Numerical Optimization, etc.
Teaching Assistant: Conducted programming tutorial sessions for the "Introduction to Robotics" course.
Previous research

Published in 3 of Google Scholar’s top 4 journals in fluid mechanics — see ranking.
Classical control


Enhanced autonomous-driving trajectory planning via Model Predictive Control (MPC) by refining cost functions for dynamic elements and explored hard-constraint collision avoidance.
Learning-based control

Tackled the challenges quadruped robots face when navigating deformable terrains, employing NVIDIA Isaac Sim for simulation and a reinforcement learning framework to enable resilient and adaptive locomotion strategies.
Project page ↗︎
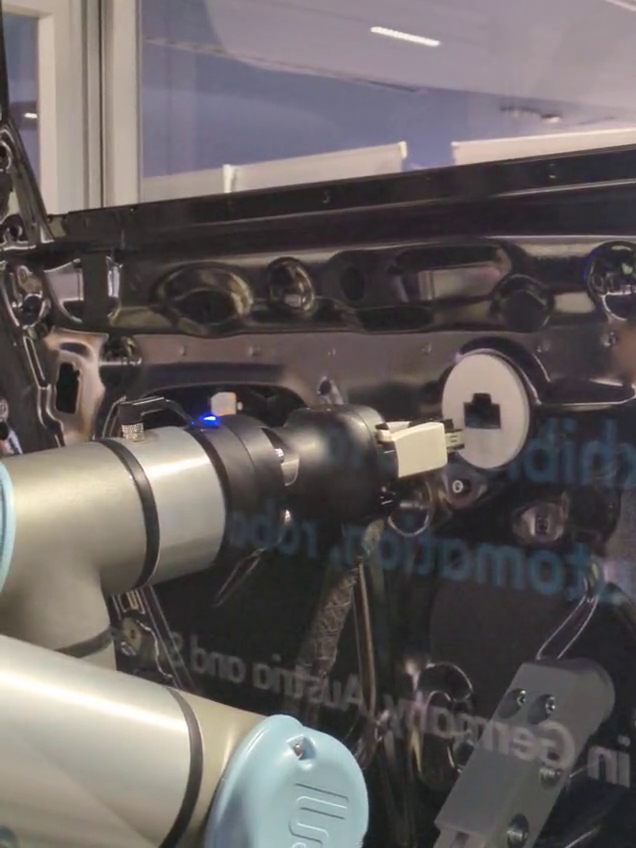
Developed Peg-in-Hole MuJoCo task environment with control and teleoperation modules and integrated real-time learning (Reinforcement Learning/Imitation Learning) pipelines for human-in-the-loop RL training with a ROS–Flask server for controlling a Robotiq Hand-e gripper-equipped UR5e robot arm.
Fun
Side projects and experiments where I explore new tech, play with hardware, and tinker with ideas just for fun.
news
| Jun, 2025 | Attended automatica 2025 in Munich. |
|---|---|
| Mar, 2025 | Volunteered at the European Robotics Forum in Stuttgart and took part in company visits to Neura Robotics, Fraunhofer IPA, Arena 2036, and FANUC. |
| Mar, 2025 | Presented at the 1st German Robotics Conference in Nuremberg. |
| Jul, 2024 | Started internship at Fraunhofer IPA, Stuttgart. |
| Mar, 2024 | Defended Master’s thesis “Robot Learning of Quadrupedal Locomotion on Deformable Terrain” at RWTH Aachen. |
selected works
- ihmtc2019
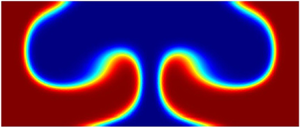
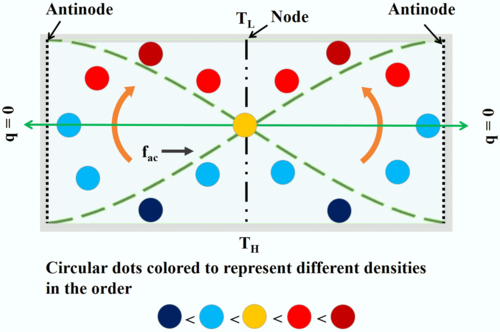
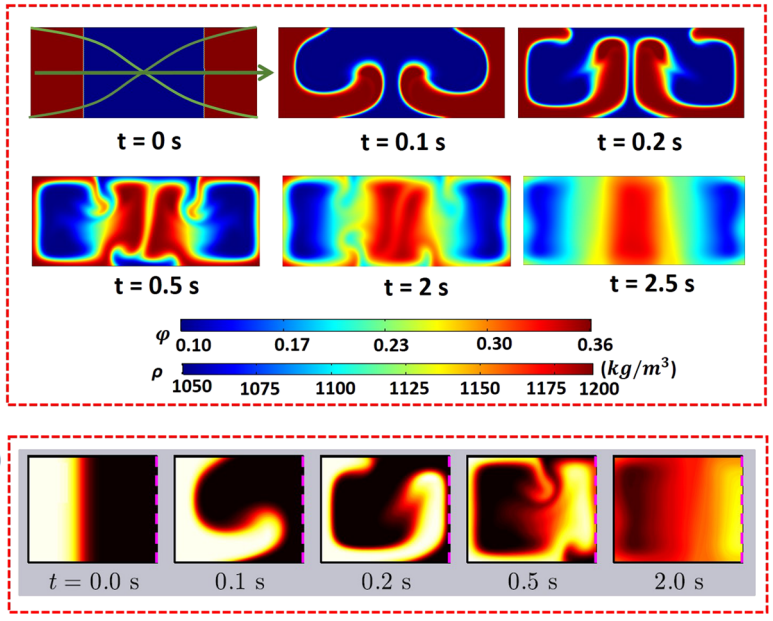
 A Novel Heat Transfer Mechanism Using Acoustic WavesIn Proceedings of the International Heat and Mass Transfer Conference, IIT Roorkee, Dec 2019All authors contributed equally to this work
A Novel Heat Transfer Mechanism Using Acoustic WavesIn Proceedings of the International Heat and Mass Transfer Conference, IIT Roorkee, Dec 2019All authors contributed equally to this work